
资讯中心
资讯中心
联系我们
联系人:王先生
手机:+86 186 6686 6638
电话:0769-22023786
邮箱:tom@gdcnzn.com
地址:广东省东莞市松山湖园区科技四路16号1栋1312室
行业新闻
Force Dimension 全系列触觉反馈装置:给用户真实的沉浸式体验
- 作者:王先生
- 发布时间:2018-08-18
- 点击:181次
如何定义一款优秀的力反馈设备?
一款优秀的力反馈设备能够做到:操作者可以随意的自由运动,低驱动惯性和低摩擦,无动作限制,给客户真实的沉浸感。
本期为大家带来的品牌及产品介绍是来自 Force Dimension 的全系列触觉反馈装置。

Force Dimension 公司依托瑞士洛桑联邦理工学院(EPFL),成立于2001年,致力于高精度触觉再现技术创新。其研发制造有并联结构触力反馈主手Delta、Omega、Sigma、Lambda四大系列产品,在机器人、工业、航空航天、医疗和消费电子等领域方面获得国际认可。同时,与EPFL、Stanford University以及瑞士设计中心等各国研发机构保持多年密切合作交流,服务全球触觉再现技术研究。
广东意大利贵宾会智能科技有限公司代理经营瑞士 Force Dimension 全系列触觉反馈装置,以顾问型销售模式,从用户利益角度提供专业建议和解决方案,与用户建立长期友好合作。服务科研,助力科技!
原理概述
人有五感:触、视、听、嗅、味,触觉(力觉)是唯一具有双向传递信息能力的信息载体。通过应用力反馈设备,用户可以真实的按照人类的肢体语言与机器进行信息交互,获得和触摸实际物体时相同的运动感,即可以产生真实的沉浸感。
Haptics
力触觉(Haptics)的感知是一种无所不在的对环境的感知能力,对于科研领域可以简单分为三大类:人类感知(生物神经)、机器感知(传感器)、计算机虚拟感知(数学建模)。
Tactile
接触区域的原始信息,如温度、颜色、纹理、刚度、形状、振动等,对于触觉感知,更多的是关注后四者。
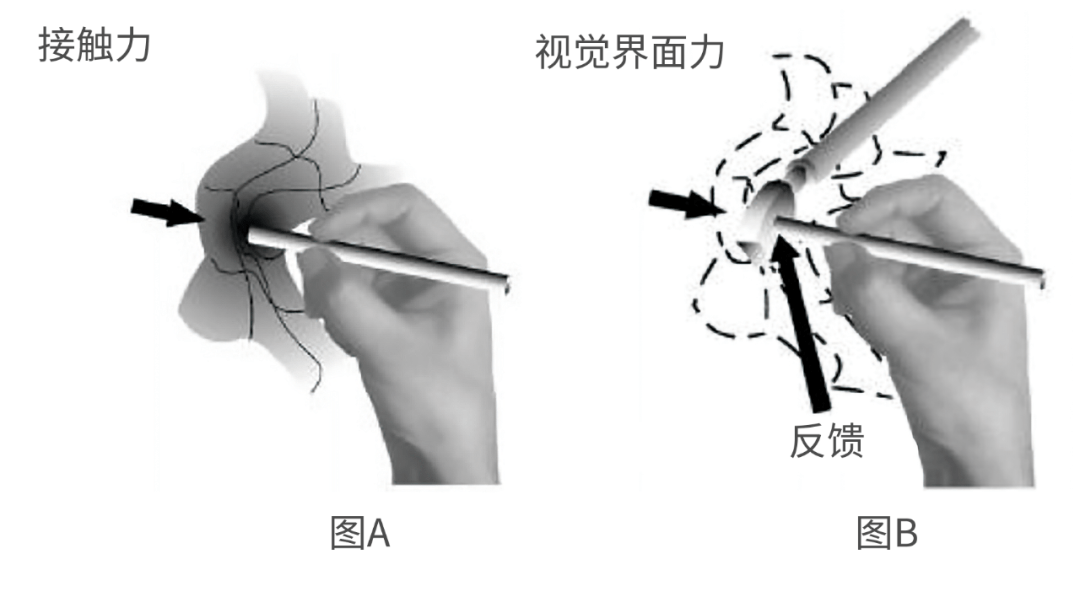
图A:真实物体受力发生弹性变形,产生一个如图所示的反作用力。
图B:力反馈装置需要模拟出真实物体受力后产生反作用力的物理过程,这其中就包含采集人手的位置和着力信息,以及模拟出反作用力。
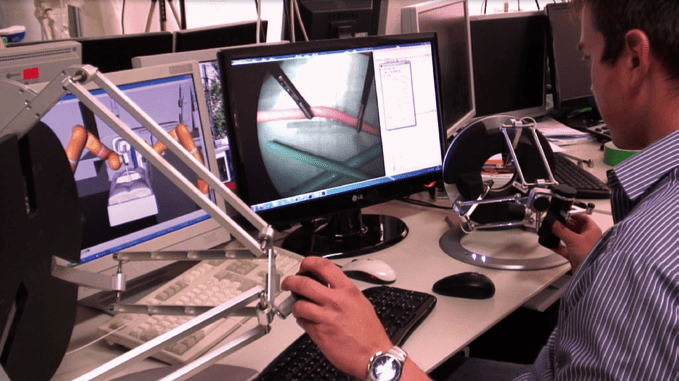
力反馈系统由用户、力反馈主手、机器人前段和计算机组成,力反馈在其中作为双向传递力信号的枢纽,一方面利用传感器测量客户的运动和位置,另一方面接受来自计算机和机器人前段的力学和运动信号,通过电机驱动等方式将力感反馈给用户,达到实时交互的效果。
围绕独特Delta并联机构设计,使用氧化铝精细抛光运动连杆与框架,提供三自由度到七自由度模块化选型,并搭配不同末端执行器。
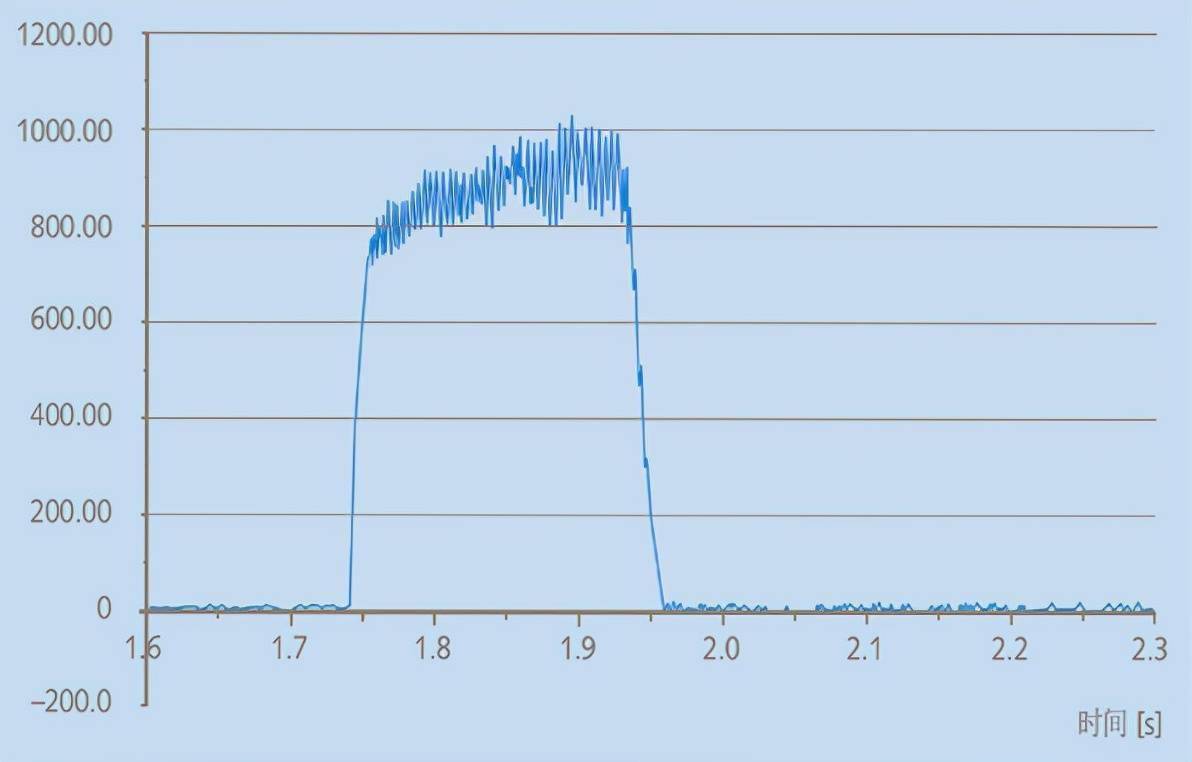
具有较大持续力,且持续时间足够稳定
使用力反馈设备操作机械臂进行持续性施力动作时,如组织穿刺、工件装持,完成一次动作均需要较长时间,稳定的施力是动作完成的基本条件。
合适的操作范围和机械自由度

主从手之间可以设置一定的位移和施力放大倍率,因而仅需考虑力反馈主手,让使用者能够在其活动范围内自由运动,自由度也是很关键的因素,如Omega.6为6in-3out。
较高的刚度,保证触力传递稳定性

力反馈设备的结构选择决定了其刚度和稳定性,Delta并联结构具有三角稳定性,刚度性能优越,持续力范围内变形非常小,使得操作更为准确。
低摩擦以及无多余振动
使用者直接接触力反馈主手,要获得更真实的触感,机械结构的摩擦、机械部件的重力、运动部件的振动等,需要具有十分严苛的补偿,直接体现为空载时的移动顺畅无阻力以及自动悬停。
合适的刷新频率以保证触感真实
类比于视觉,人眼感受到流畅的画面一般在24帧以上,低于24帧会产生卡顿感,而触觉则需要1K以上信息交互,即力反馈设备需达到1K以上刷新率,才能让使用者感受到流畅的触感。
符合人体工学设计和舒适性
- 上一篇:机器人本体包括哪几部分?
- 下一篇:没有了!
新闻资讯
-
2018-08-18
Force Dimension 全系列触觉反馈装置:给用户真实的沉浸式体验
-
2018-05-25
力反馈(Force feedback)技术
-
2017-08-19
机器人触觉交互研究
-
2018-12-28
机器人本体包括哪几部分?






 客服1
客服1